Simple communication between Processing and Arduino via Firmata
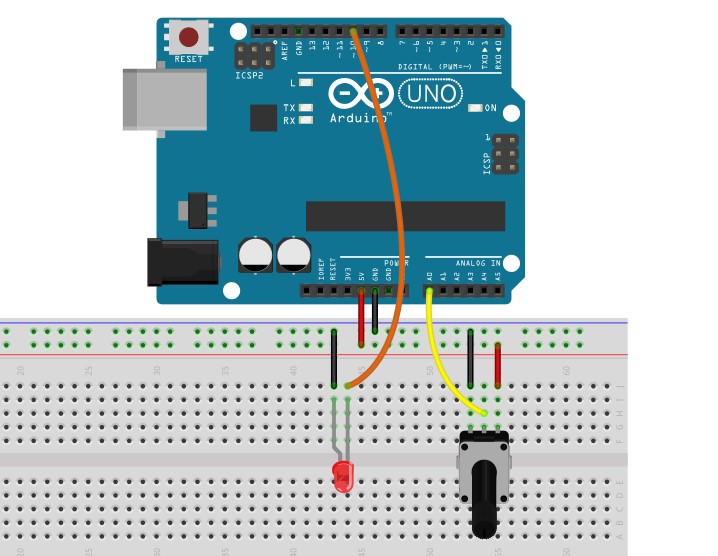
basic input/output setup with firmata and Processing
This setup offers a basic in- and output communication for Arduino to Processing with a minimalistic firmata interface.
Tested and works with under Windows with Arduino UNO | LEONARDO | MICRO PRO
PROCESSING CODE
import processing.serial.*;
import cc.arduino.*;
Arduino arduino;
int led_pin = 11; // testLED on pin 10!
int analog_pin = 0; // analog input from poti on A0
void setup() {
size(400,400); // setup the stage size
background(22);
// Prints out the available serial ports.
println(Arduino.list());
// initalize Arduino ( pick first COM device > need to be changed if u have more! )
arduino = new Arduino(this, Arduino.list()[0], 57600);
// set the LED pin to output mode
arduino.pinMode(led_pin,Arduino.PWM);
for (int i = 0; i <= 13; i++){
// arduino.pinMode(i, Arduino.PWM);
// arduino.digitalWrite(i, Arduino.HIGH);
}
print(" >>> --- Arduino says Hello ;) -- >>> ");
println(arduino);
}
void draw() {
background(#FFC505); // draw background
// Potentiometer INPUT --------------------------
int potiIn = arduino.analogRead(analog_pin); // read poti value > outputs 0 - 1024
fill( potiIn*.25 ); //map poti value from 1024 to 255 as fill color
circle(width/2,height/2,potiIn*.25); // draw circle with dynamic radius
// LED OUTPUT --------------------------
float r_mouse_pos_x = float(mouseX)/float(width); // get the relative mouse x position on stage
//arduino.digitalWrite(led_pin, Arduino.HIGH); // change led brightness along mouseX
arduino.analogWrite(led_pin, int(r_mouse_pos_x*255));
println(int(r_mouse_pos_x*255));
}
UPDATED! Analog & Digital Communication via Firmata for Arduino/Processing
UPDATED FIRMATA CODE FOR ARDUINO
#include <Firmata.h>
byte previousPIN[TOTAL_PORTS]; // PIN means PORT for input
byte previousPORT[TOTAL_PORTS];
void outputPort(byte portNumber, byte portValue)
{
// only send the data when it changes, otherwise you get too many messages!
if (previousPIN[portNumber] != portValue) {
Firmata.sendDigitalPort(portNumber, portValue);
previousPIN[portNumber] = portValue;
}
}
void setPinModeCallback(byte pin, int mode) {
if (IS_PIN_DIGITAL(pin)) {
pinMode(PIN_TO_DIGITAL(pin), mode);
}
}
void digitalWriteCallback(byte port, int value)
{
byte i;
byte currentPinValue, previousPinValue;
if (port < TOTAL_PORTS && value != previousPORT[port]) {
for (i = 0; i < 8; i++) {
currentPinValue = (byte) value & (1 << i);
previousPinValue = previousPORT[port] & (1 << i);
if (currentPinValue != previousPinValue) {
digitalWrite(i + (port * 8), currentPinValue);
}
}
previousPORT[port] = value;
}
}
// init ANALOG inputs
byte analogPin = 0;
void analogWriteCallback(byte pin, int value)
{
if (IS_PIN_PWM(pin)) {
pinMode(PIN_TO_DIGITAL(pin), OUTPUT);
analogWrite(PIN_TO_PWM(pin), value);
}
}
void setup()
{
Firmata.setFirmwareVersion(FIRMATA_FIRMWARE_MAJOR_VERSION, FIRMATA_FIRMWARE_MINOR_VERSION);
// Firmata.attach(DIGITAL_MESSAGE, digitalWriteCallback);
Firmata.attach(SET_PIN_MODE, setPinModeCallback);
Firmata.attach(ANALOG_MESSAGE, analogWriteCallback);
Firmata.begin(57600);
}
void loop()
{
/*
byte i;
for (i = 0; i < TOTAL_PORTS; i++) {
outputPort(i, readPort(i, 0xff));
}
*/
while (Firmata.available()) {
Firmata.processInput();
}
// do one analogRead per loop, so if PC is sending a lot of
// analog write messages, we will only delay 1 analogRead
Firmata.sendAnalog(analogPin, analogRead(analogPin));
analogPin = analogPin + 1;
if (analogPin >= TOTAL_ANALOG_PINS) analogPin = 0;
}