FULL SETUP LDR distance pir sensor IR distance interruptor https://wiki.seeedstudio.com/Grove-IR_Distance_Interrupter_v1.2/
FULL SETUP
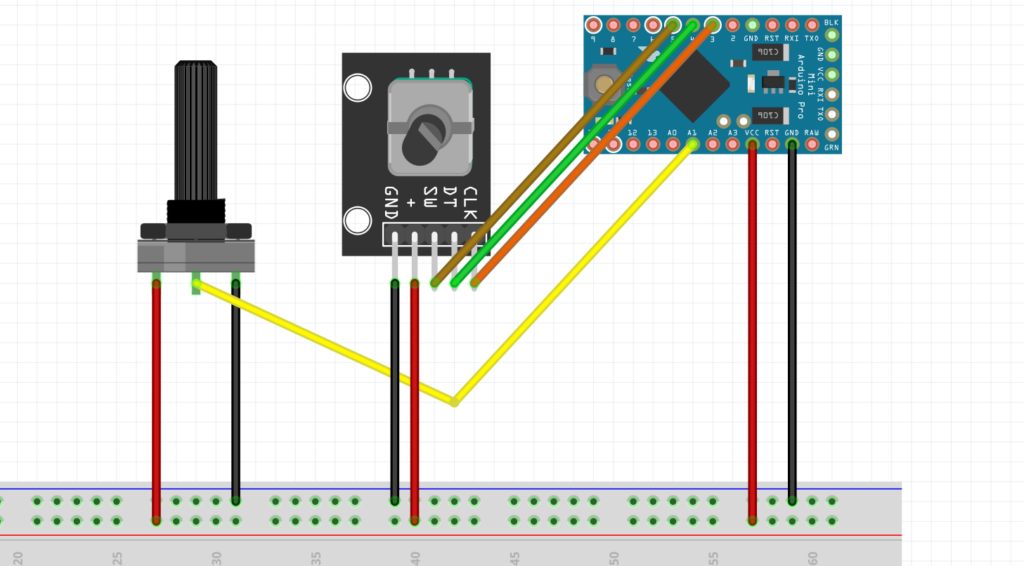
#define encoderPinA 3 // Define pin A for the encoder
#define encoderPinB 4 // Define pin B for the encoder
#define encoderSW 5 // Define pin SW for the encoder (optional)
#define poti_pin A1
int poti_val = 0;
volatile int encoderValue = 0; // Variable to store the dial value
volatile int lastEncoded = 0; // Variable to store the last encoded value
void setup() {
Serial.begin(9600); // Initialize serial communication at 9600 baud
pinMode(encoderPinA, INPUT); // Set encoder A pin as input
pinMode(encoderPinB, INPUT); // Set encoder B pin as input
pinMode(encoderSW, INPUT_PULLUP); // Set encoder SW pin as input with pull-up resistor (optional)
// Attach interrupts to the encoder pins
attachInterrupt(digitalPinToInterrupt(encoderPinA), updateEncoder, CHANGE);
attachInterrupt(digitalPinToInterrupt(encoderPinB), updateEncoder, CHANGE);
Serial.println("Encoder Test:");
}
void loop() {
// Print the encoder value
static int lastPrintValue = -1;
if (encoderValue != lastPrintValue) {
Serial.print("Encoder Value: ");
Serial.println(encoderValue);
lastPrintValue = encoderValue;
}
// Check if the encoder button is pressed (optional)
if (digitalRead(encoderSW) == LOW) {
// read out poti value
poti_val = analogRead( poti_pin );
Serial.println("Button Pressed with poti value: ");
Serial.print (poti_val);
delay(200); // Debounce delay
}
}
void updateEncoder() {
int MSB = digitalRead(encoderPinA); // Read the MSB (most significant bit)
int LSB = digitalRead(encoderPinB); // Read the LSB (least significant bit)
int encoded = (MSB << 1) | LSB; // Combine the two bits to get the encoded value
int sum = (lastEncoded << 2) | encoded; // Shift last encoded value and combine with current
if (sum == 0b1101 || sum == 0b0100 || sum == 0b0010 || sum == 0b1011) encoderValue++;
if (sum == 0b1110 || sum == 0b0111 || sum == 0b0001 || sum == 0b1000) encoderValue--;
lastEncoded = encoded; // Store the current encoded value for the next change
}
LDR
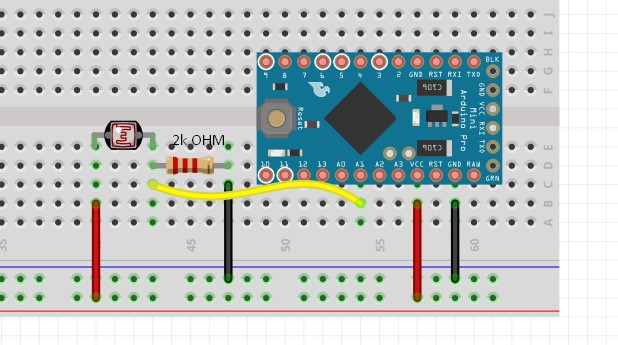
#define LDRPin A1 // Define the pin where the LDR is connected
void setup() {
Serial.begin(9600); // Initialize serial communication at 9600 baud
pinMode(LDRPin, INPUT); // Set the LDR pin as an input
}
void loop() {
int ldrValue = analogRead(LDRPin); // Read the analog value from the LDR
Serial.print("LDR Value: "); // Print the label
Serial.println(ldrValue); // Print the LDR value
delay(500); // Wait for half a second before the next reading
}
distance
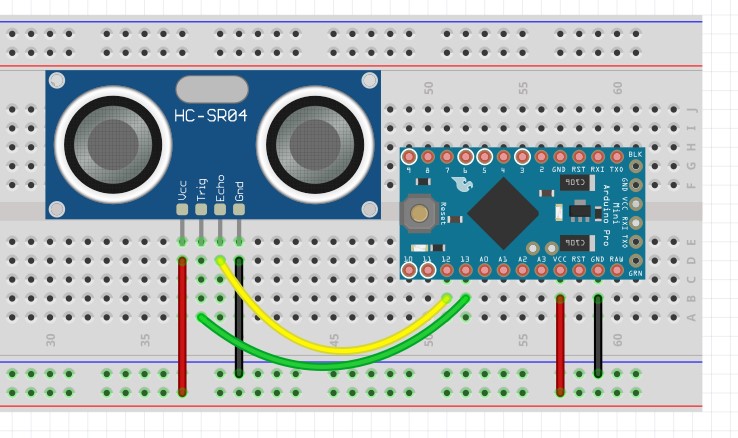
#define trigPin 13
#define echoPin 12
long duration, distance;
float voltage, speedOfSound = 0.0343; // Speed of sound in cm/us
void setup() {
Serial.begin(9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10); // Added this line
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration / 2.0) * speedOfSound; // includes Speed of Sound conversion factor into centimeters and microseconds
Serial.println(distance);
delayMicroseconds(100); // wait
}
pir sensor

IR distance interruptor
https://wiki.seeedstudio.com/Grove-IR_Distance_Interrupter_v1.2/
void setup() {
Serial.begin(9600);
pinMode(6,INPUT);
}
void loop() {
while(1) {
delay(500);
if(digitalRead(6)==LOW) {
Serial.println("Somebody is here.");
}
else {
Serial.println("Nobody.");
}
}
}