Der Proto-Dog freut sich wenn er dich sieht! Dafür braucht ihr einen Arduino o. ä. einen Servo Motor, Ultraschallsensor …
Der Proto-Dog freut sich wenn er dich sieht!
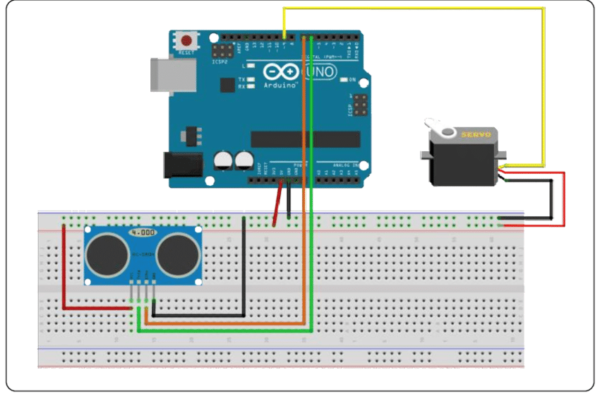
Dafür braucht ihr einen Arduino o. ä. einen Servo Motor, Ultraschallsensor und für die Gestaltung Pappe, Schere und ggf. Leim.
Code Beispiel:
</pre>
#include <Wire.h>
#include <Servo.h>
Servo myservo;
int pos = 0;
//Sensor
int trigPin = 7 ; // TRIG
int echoPin = 6 ; // ECHO
float duration_us, distance_cm;
void setup() {
// Serial.begin(9600);
myservo.attach(9);
pinMode(trigPin, OUTPUT); // Config trigger pin to output mode
pinMode(echoPin, INPUT); // Config echo pin to input mode
}
void loop() {
// Generate 10-microsecond pulse to TRIG pin
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
delayMicroseconds(10);
// Measure duration of pulse from ECHO pin
duration_us = pulseIn(echoPin, HIGH);
// Calculate the distance
distance_cm = 0.017 * duration_us;
// Calculate the distance
//Serial.println(distance_cm1);
//Wenn Ultrasonic ein Hinderniss unterhalb von 15 cm erkennt, dann das....
if (distance_cm < 15) {
for (pos = 0; pos <= 40; pos += 5) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (pos = 40; pos >= 0; pos -= 5) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
}
<pre>